無刷馬達工作原理,無刷馬達電路圖-KIA MOS管
信息來源:本站 日期:2025-10-28
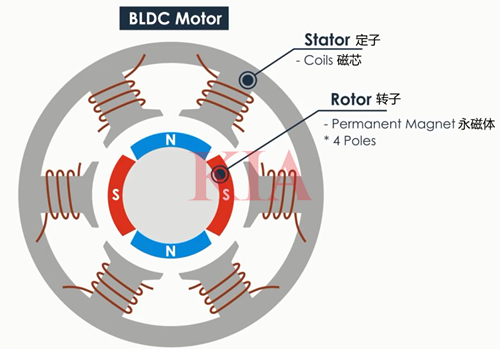
無刷馬達(無刷直流電機)的工作原理是通過電子換向器替代傳統的機械換向器,實現電機轉子的連續旋轉。無刷馬達通過電子換向系統替代傳統機械電刷,利用位置傳感器檢測轉子磁極位置,控制器驅動定子繞組產生旋轉磁場,從而驅動永磁體轉子旋轉,實現高效、低磨損的能量轉換。
無刷馬達組成:
1.定子:包含硅鋼片疊壓鐵芯和三相繞組線圈,通電后產生旋轉磁場。
2.轉子:由永磁體(如釹鐵硼)構成,提供恒定磁場,與定子磁場相互作用產生轉矩。
3.位置傳感器:霍爾傳感器或編碼器實時檢測轉子位置,輸出信號至控制器。
4.電子控制系統:包括微處理器(MCU)和驅動電路(如三相逆變器),根據位置信號生成PWM波形控制繞組電流。
無刷馬達工作原理步驟:
1.位置檢測與信號處理:位置傳感器(如霍爾元件)監測轉子磁極位置,輸出相位差120°的方波信號至控制器。
2.電子換向控制:控制器根據位置信號,通過功率開關管(MOSFET/IGBT)按特定時序導通定子繞組。例如,當霍爾信號為101時,控制器驅動U相上橋臂和V相下橋臂導通,形成U→V的電流路徑,產生旋轉磁場。
3.磁場驅動與轉子旋轉:定子旋轉磁場與轉子永磁體磁場相互作用,產生連續轉矩。通過六步換向邏輯(U→V→W→U循環),磁場以60°電角度步進旋轉,推動轉子同步轉動。
無刷直流電機(BLDC)是一種高效、高可靠性、低噪聲和低維護成本的電機,由于其優異的性能,在許多應用中得到了廣泛的應用,例如家用電器、工業自動化、電動車等。
三相六臂全橋驅動電路

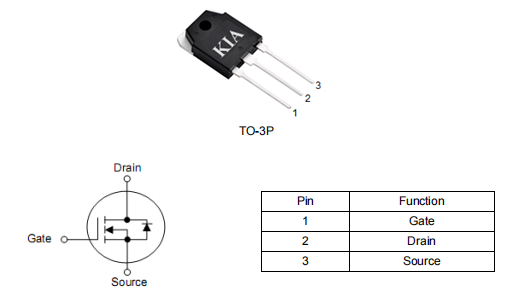
無刷直流電機驅動控制電路如圖所示,采用三相六臂全橋驅動方式,采用此方式可以減少電流波動和轉矩脈動,使得電機輸出較大的轉矩。在電機驅動部分使用6個功率場效應管控制輸出電壓,四軸飛行器中的直流無刷電機驅動電路電源電壓為12 V.驅動電路中,Q1~Q3采用IRFR5305(P溝道),Q4~Q6為IRFR1205(N溝道)。該場效應管內藏續流二極管,為場效應管關斷時提供電流通路,以避免管子的反向擊穿,其典型特性見參數表,T1~T3 采用PDTC143ET 為場效應管提供驅動信號。
無刷直流電機驅動控制采用三相六狀態控制策略,功率管具有六種觸發狀態,每次只有兩個管子導通,每60°電角度換向一次,若某一時刻AB 相導通時,C 相截至,無電流輸出。單片機根據檢測到的電機轉子位置,利用MOSFET的開關特性,實現電機的通電控制,例如,當Q1、Q5 打開時,AB 相導通,此時電流流向為電源正極→Q1→繞組A→繞組B→Q5→電源負極。類似的,當MOSFET 打開順序分別為Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5時,只要在合適的時機進行準確換向,就可實現無刷直流電機的連續運轉。
三相全橋驅動電路
無刷電機三相全橋驅動電路,使用六個N溝道的MOSFET管(Q1~Q6)做功率輸出元件,工作時輸出電流可達數十安。為便于描述,該電路:Q1/Q2/Q3稱做驅動橋的“上臂”,Q4/Q5/Q6稱做“下臂”。

圖中R1/R2/R3為Q1/Q2/Q3的上拉電阻,連接到二極管和電容組成的倍壓整流電路(原理請自行分析),為上臂驅動管提供兩倍于電源電壓(2×11V)的上拉電平,使上臂MOSFET在工作時有足夠高的VGS壓差,降低MOSFET大電流輸出時的導通內阻,詳細數據可參考MOS管DataSheet。
上臂MOS管的G極分別由Q7/Q8/Q9驅動,在工作時只起到導通換相的作用。下臂MOS由MCU的PWM輸出口直接驅動,注意所選用的MCU管腳要有推挽輸出特性。
KIA半導體是一家致力于功率半導體電子元器件研發與銷售的高新技術型企業,竭誠服務全球開關電源、綠色照明、電機驅動、汽車電子、新能源充電樁、太陽能設備、數碼家電、安防工程等行業長期合作伙伴,主動了解客戶需求,不斷研發創新,為客戶提供綠色、節能、高效的功率半導體產品。

聯系方式:鄒先生
座機:0755-83888366-8022
手機:18123972950(微信同號)
QQ:2880195519
聯系地址:深圳市龍華區英泰科匯廣場2棟1902
搜索微信公眾號:“KIA半導體”或掃碼關注官方微信公眾號
關注官方微信公眾號:提供 MOS管 技術支持
免責聲明:網站部分圖文來源其它出處,如有侵權請聯系刪除。

<ul id="ou8ay"></ul>